首页 >> 综合要闻
微型机器人新进展,微纳3D打印加速破解制造难题
发布时间:2025-6-11 17:38:02 点击:1441
来源:科学网
来源:科学网
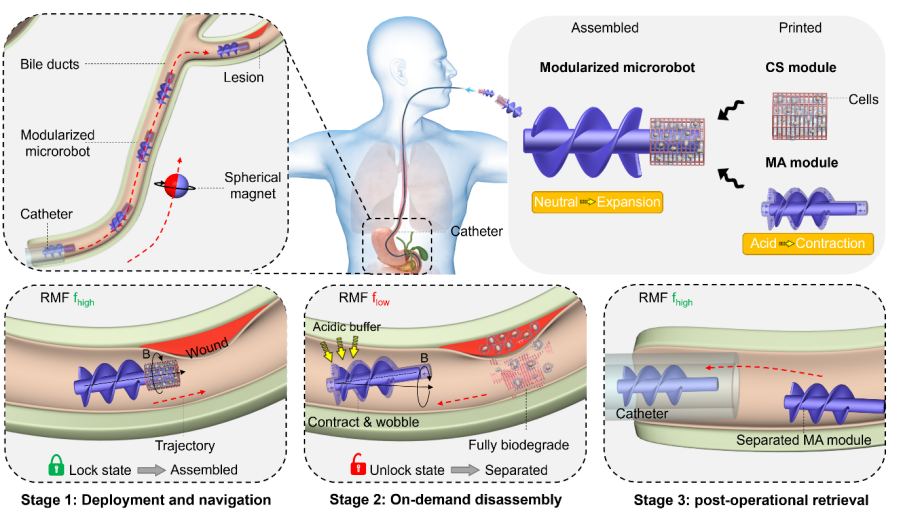
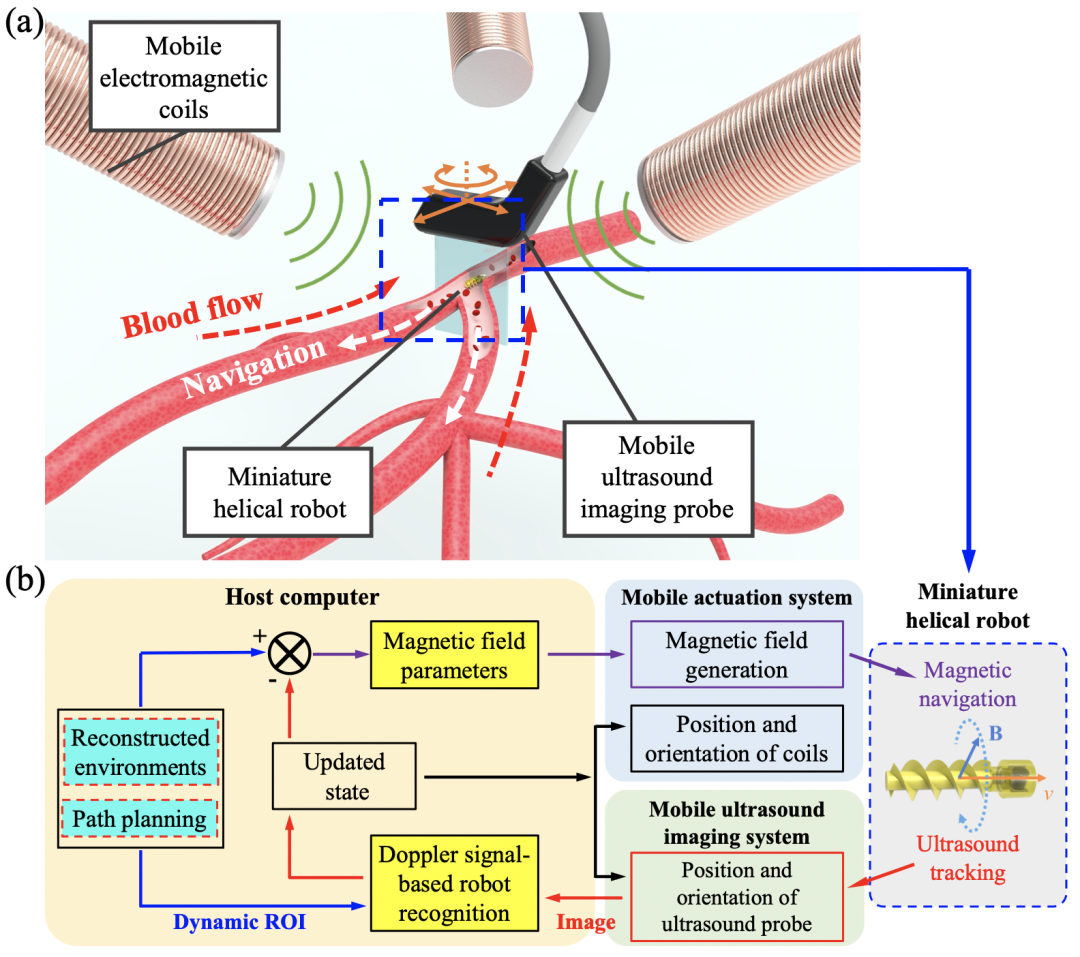
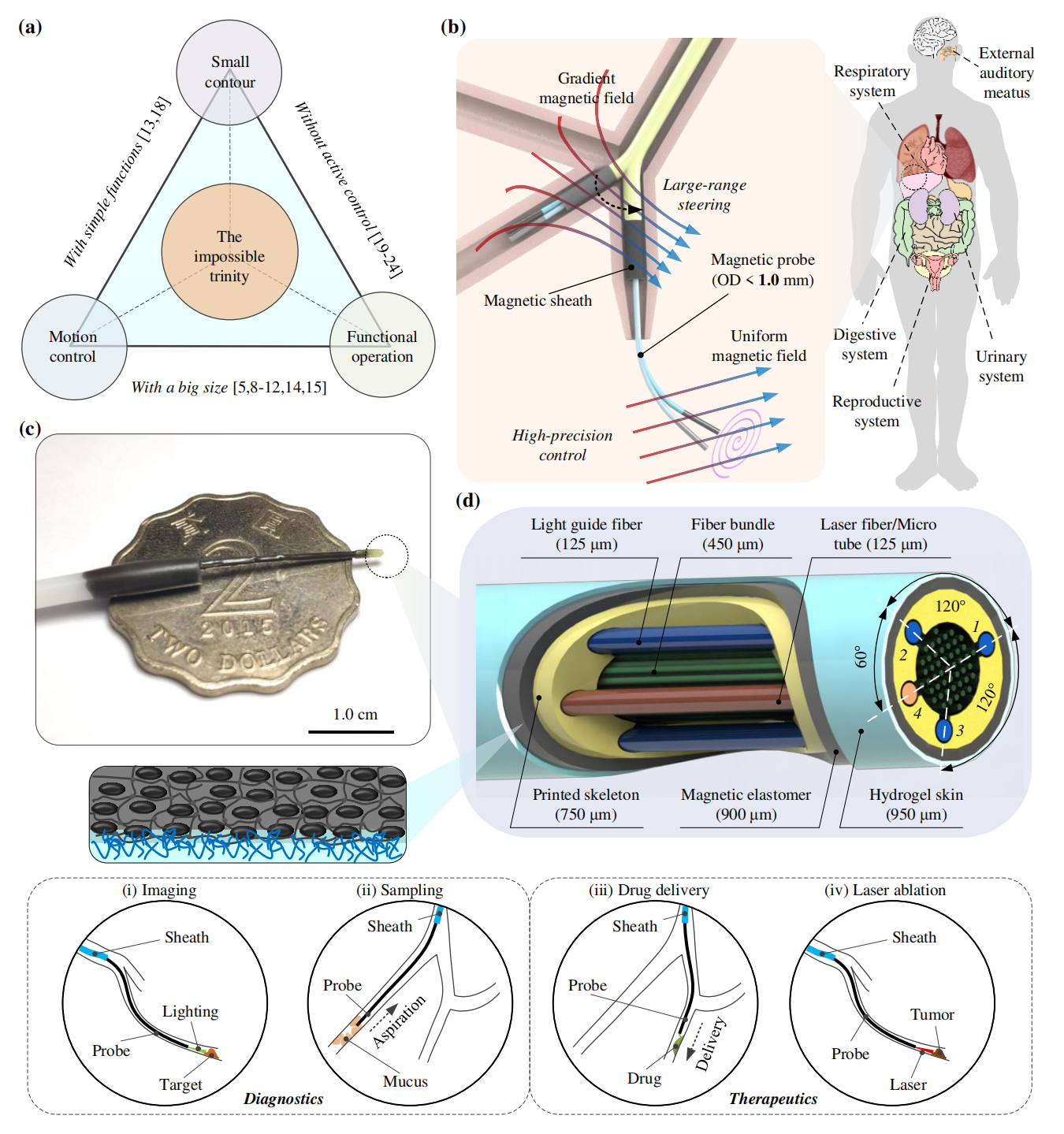
微型机器人(Microbotics)是一种尺寸在毫米至微米级的智能装置,能够将外界能量转化成主动运动的微小型器件。随着生物医疗、材料科学、微机电系统、微纳米技术等高精尖技术的融合发展,关于微型和纳米机器人的新兴科学逐步取得突破。从概念设计到模型验证,其在生物医学和工业领域彰显了广阔应用前景。例如在精准医疗,可用于人体血管、肠道等狭窄环境,执行靶向药物递送、血栓清除、组织修复等高难度任务。在工业领域,可用于复杂环境监测,以及精密部件的组装,有效提高作业效率。此外,还可用于高端制造、灾难救援、军事等行业。